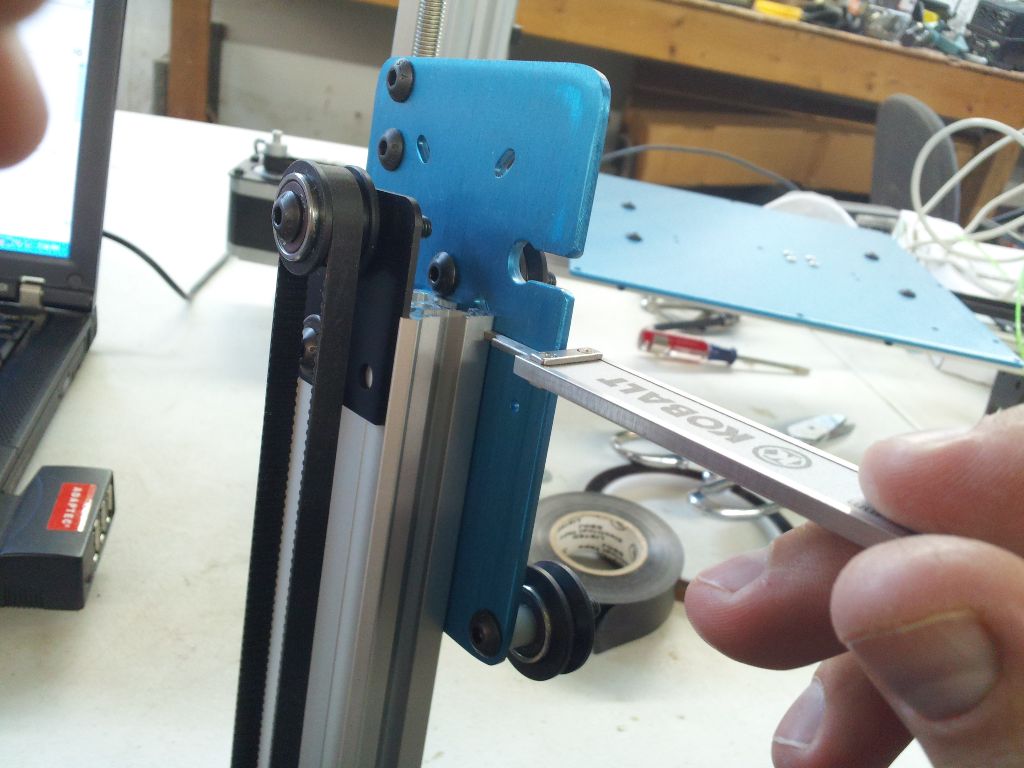
So I finally made some time late at night to work on my ord bot. First thing I did was try to true up some of the brackets, make sure everything is straight and tight.
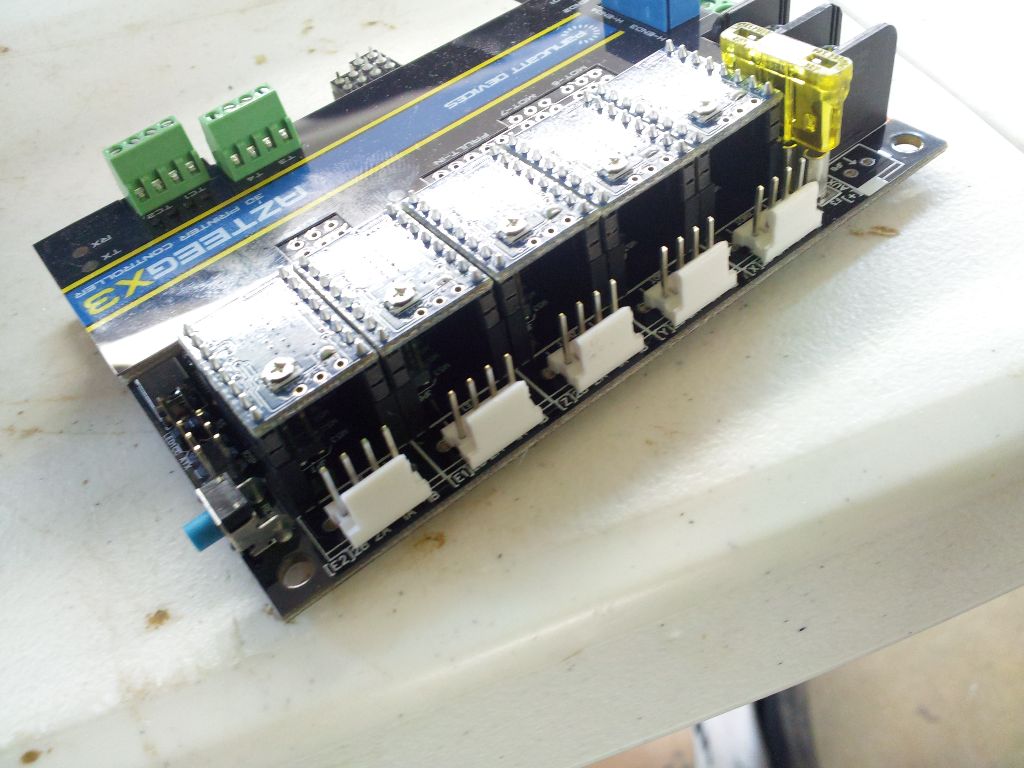
Next I went ahead and soldered the stepper headers onto the azteeg x3, I decided this look was cleaner than going with the screw terminal approach.

Finally it was time to wire up the power supply. I just chopped up an old IEC cable and screwed the terminals down.
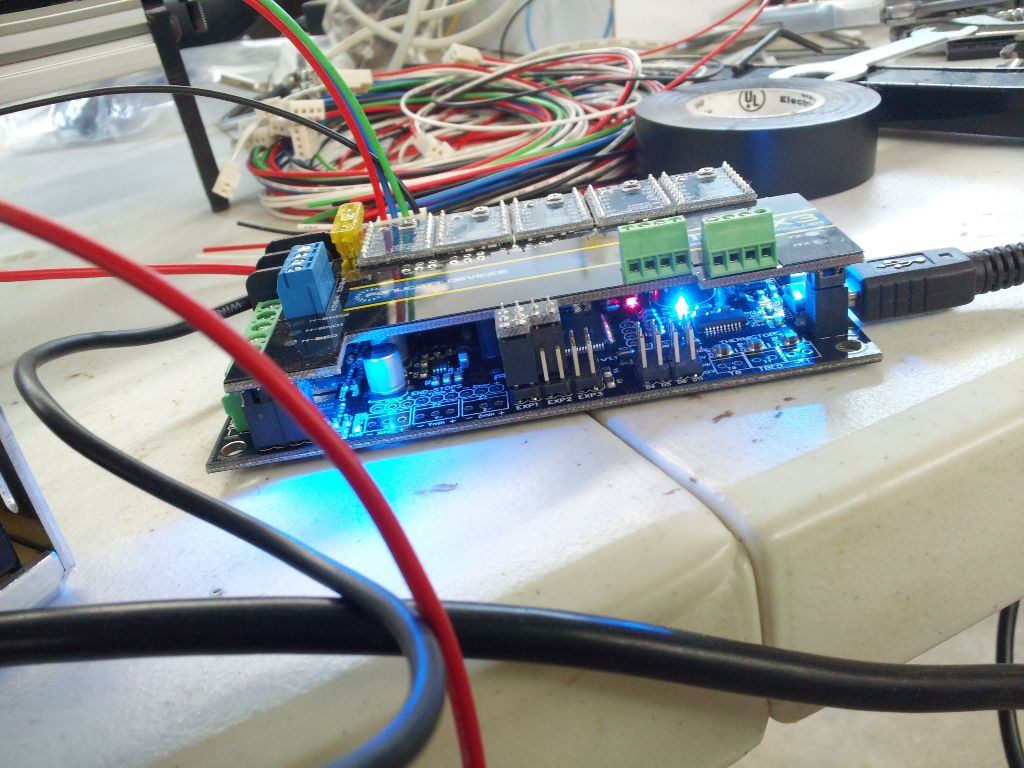
A quick power on test of the azteeg.
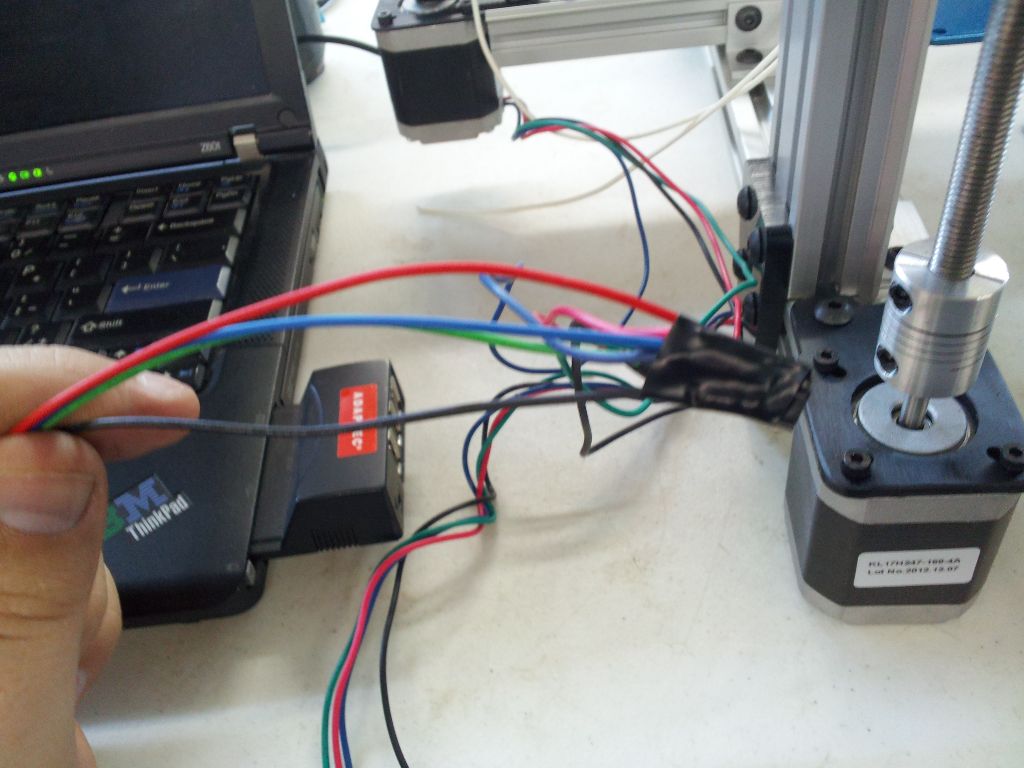
A little bit of wire twisting, some electrical tape and I loaded up Marlin firmware sketch, tweaked the values a little to match the azteeg x3. From here I ran into an issue where the board went into failsafe block mode because I don’t have any of the thermocouples hooked up it thought it was frying its self, so I disabled those in the firmware. Try #2, I was getting steps, but not good steps. I adjusted the stepper current using a meter and a small screwdriver on the pots, but still odd movement. I finally realized that I hadn’t put any jumpers on the microstepping selector and was doing full steps. After setting that it was moving like butter!
Here is a video of me just playing with the motor back and forth.
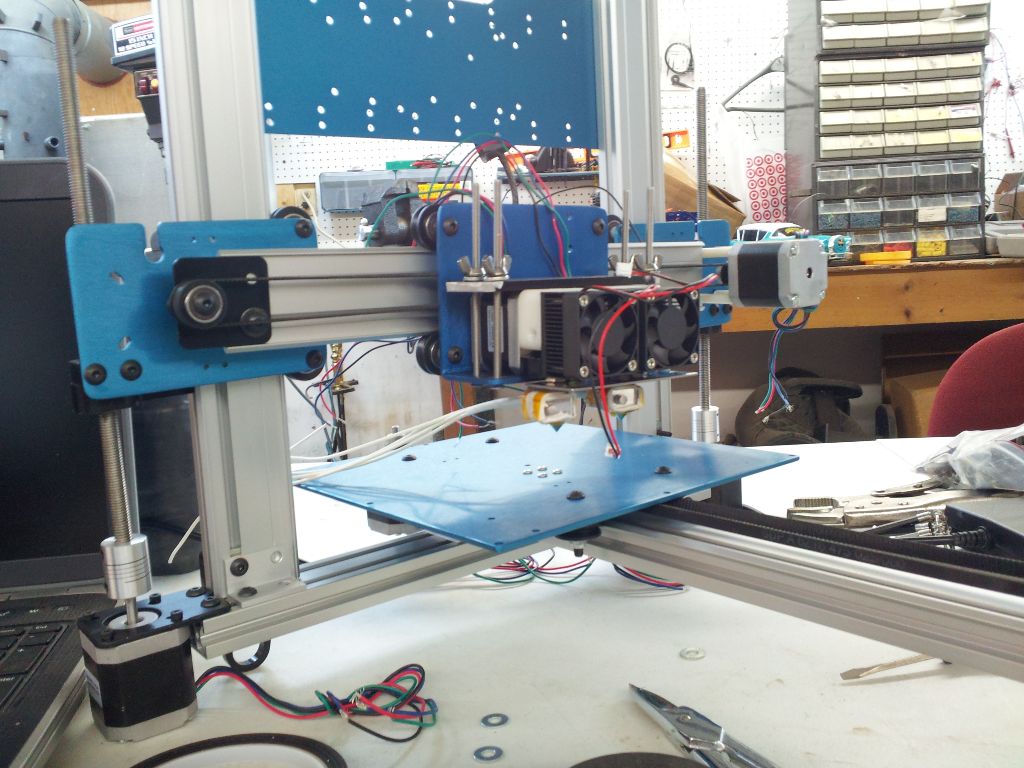
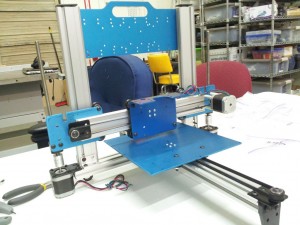 I was greeted with a package today containing some of the parts for my 3d printer (ord boy hadron). So late last night I spent about 6 hours putting the frame together. I can’t say the assembly documentation was well spelled out, it was just barely enough to get it done. And even then I know I put some parts on wrong. I’m not worried about it though I just wanted to roughly put it together, as I have no electronics other than steppers at the moment. So I’m still waiting on the extruder, heat bed, controller. I didn’t bother running wires or aligning the rails. It moves pretty good but I need to take the gantry off and flip the mounting bracket for the extruder, also some how I have the stepper on the wrong side for the y axis even though it shouldn’t matter. I feel good about it, there were some annoying things like the front foot didn’t mount well. The holes in the aluminum weren’t tapped and the only tap I had was a cheap chinese one that didn’t work _at all_.
I was greeted with a package today containing some of the parts for my 3d printer (ord boy hadron). So late last night I spent about 6 hours putting the frame together. I can’t say the assembly documentation was well spelled out, it was just barely enough to get it done. And even then I know I put some parts on wrong. I’m not worried about it though I just wanted to roughly put it together, as I have no electronics other than steppers at the moment. So I’m still waiting on the extruder, heat bed, controller. I didn’t bother running wires or aligning the rails. It moves pretty good but I need to take the gantry off and flip the mounting bracket for the extruder, also some how I have the stepper on the wrong side for the y axis even though it shouldn’t matter. I feel good about it, there were some annoying things like the front foot didn’t mount well. The holes in the aluminum weren’t tapped and the only tap I had was a cheap chinese one that didn’t work _at all_.













 I got my
I got my 











